Salta al contenuto
Corso di
Agricultural Engineering
Home
Corso di Studio
Obiettivi Formativi
Struttura dei Corsi
Regolamento Didattico
Studenti
Criteri di Ammissione
Premi e Borse di Studio
Piano degli Studi
Didattica Innovativa
Mobilità Internazionale
Proposte di Tesi
Esame di Laurea Magistrale
Lavoro
Status Professionale
Sbocchi Professionali
Ricerca
Aree di Ricerca
Laboratorio ROSETEA
Contatti
Mappa e Contatti
Uffici
Referenti e Commissioni
Facebook
Instagram
Foto e Video
Collegamenti utili
Area Riservata
Privacy
Ricerca nel sito
Search
Proposte di Tesi
Impatto dell’intelligenza artificiale nell’agroalimentare
Quadro di valutazione per l’impatto dell’innovazione digitale nell’agroalimentare
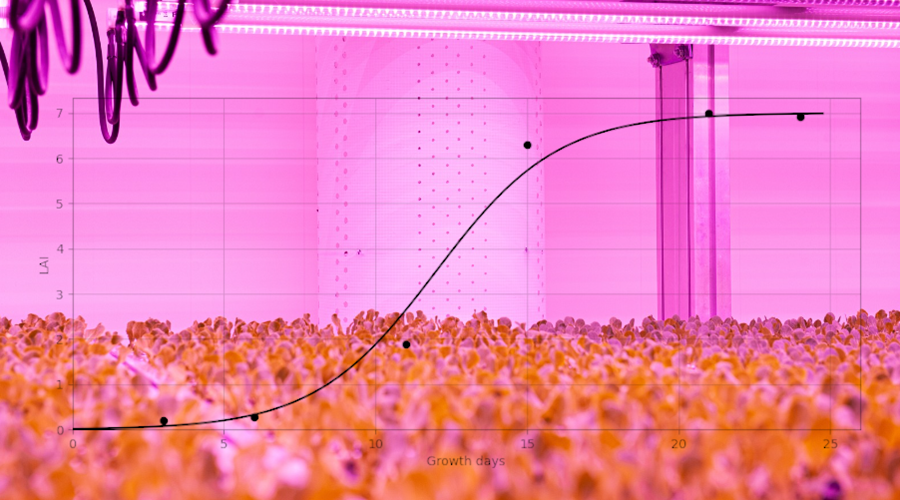
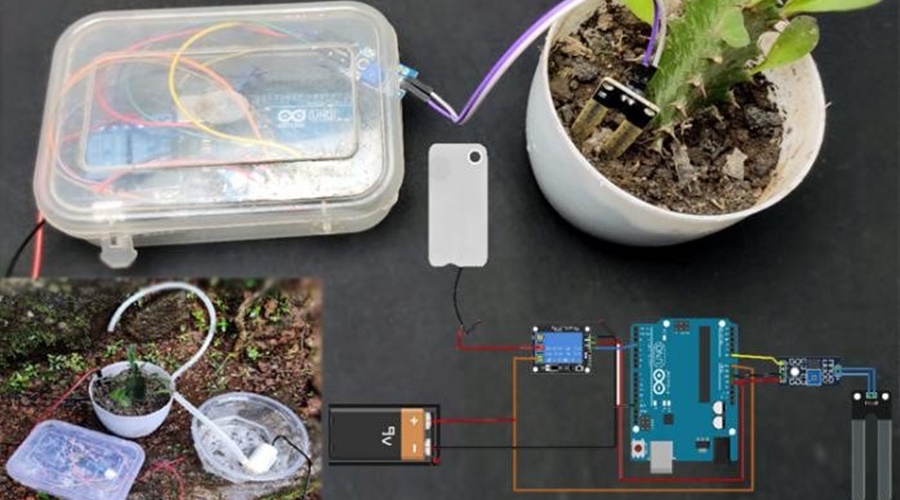
Modelli biofisici di crescita delle piante per l’ottimizzazione della coltivazione in indoor farming
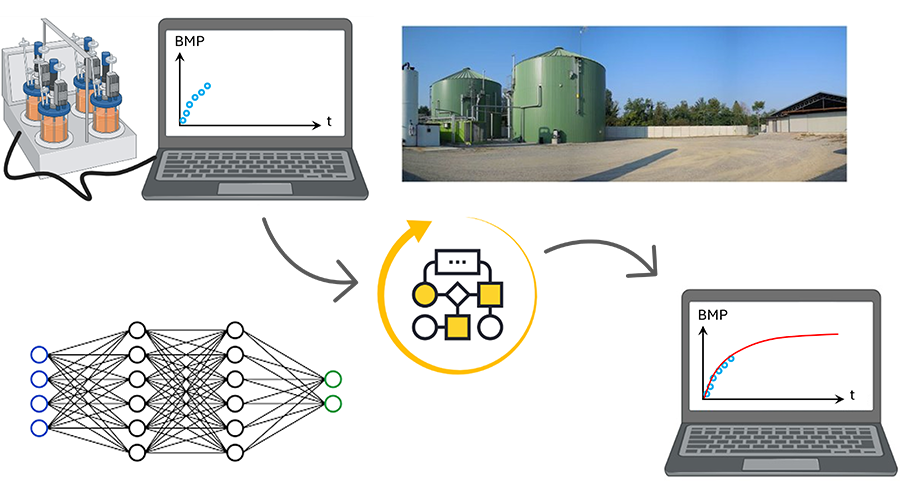
Stima anticipata del potenziale biochimico del metano (BMP) utilizzando il Machine Learning
Revisione sistematica delle esperienze riguardanti gli effetti della Smart Agriculture
Un robot per l’automazione della stalla
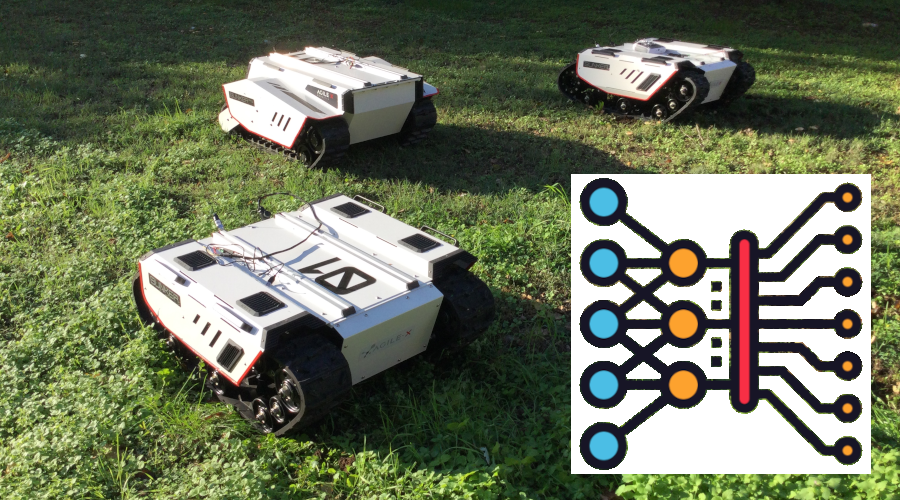
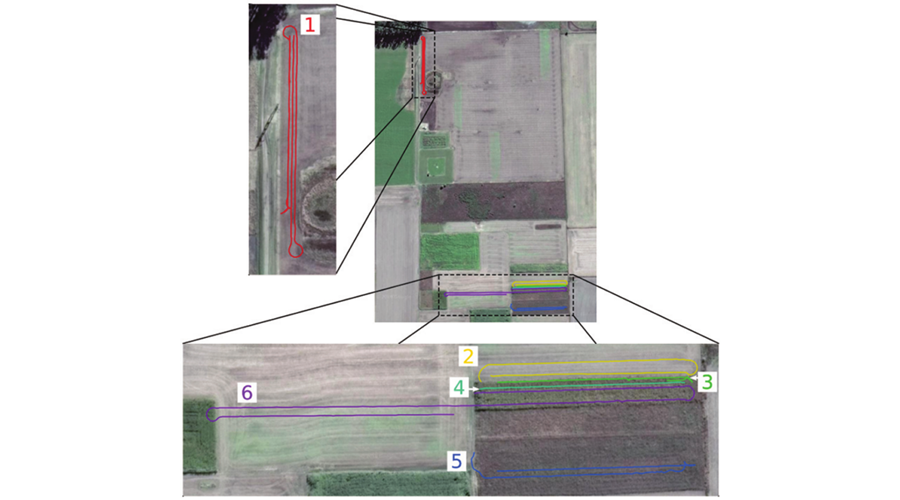
Navigazione autonoma di un robot cingolato ad uso agricolo
Stimare lo slip di un cingolo con tecniche di machine/deep learning
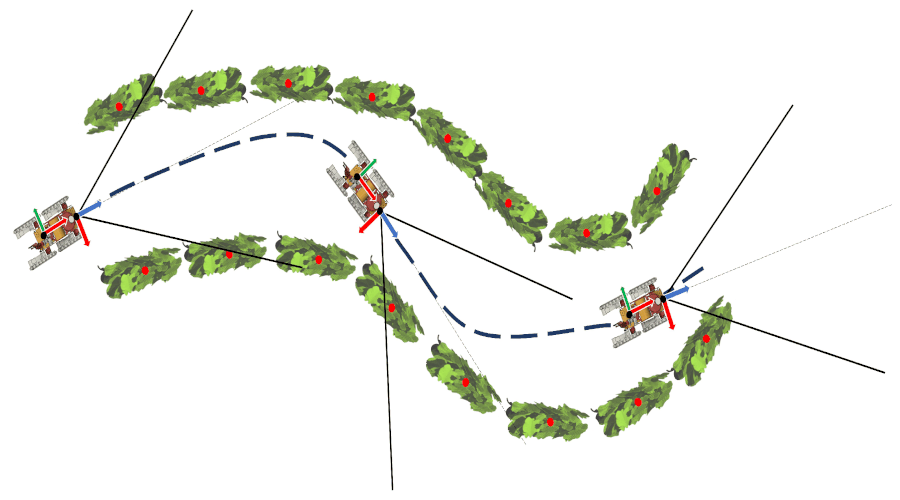
Localizzazione e mapping per la navigazione autonoma in vigna
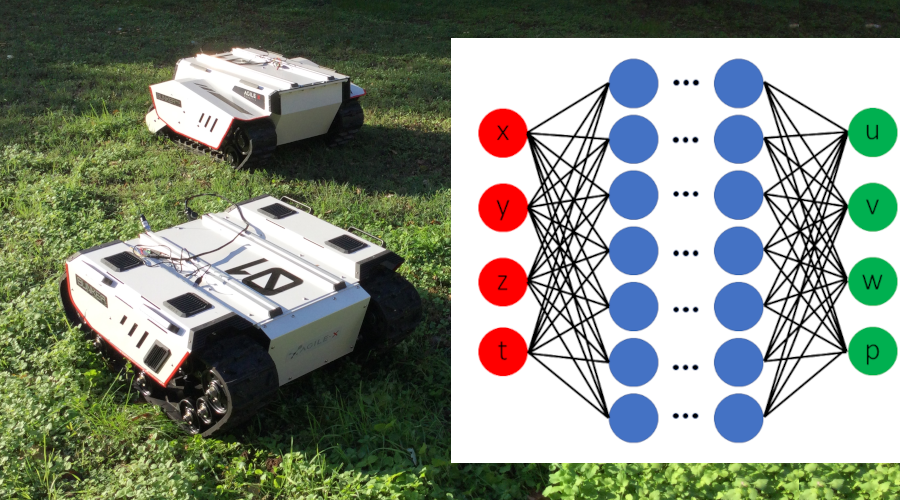
Utilizzare reti neurali PINN per modellizzare un robot agricolo
Produzione di energia rinnovabile e uso efficiente a livello aziendale
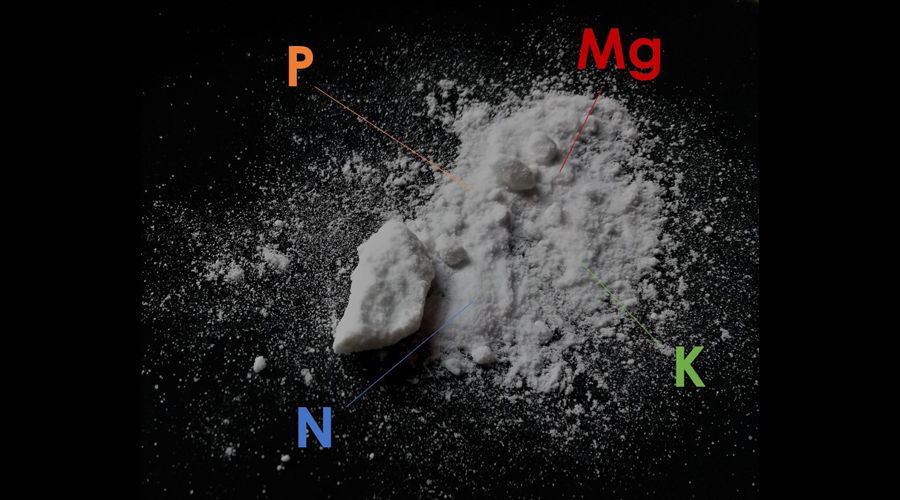
Recupero di nutrienti da rifiuti organici agricoli per fertilizzanti sostenibili
Recupero di risorse da rifiuti organici agroalimentari mediante batteri fototrofici viola
Localizzazione e mapping per applicazioni agricole
Sviluppo di esperimenti didattici per il laboratorio del corso Control Systems for Smart Agriculture
Modellazione di un robot fuoristrada per applicazioni agricole
Modellizzare l’interazione di un robot per applicazioni agricole con il terreno