L’innovazione digitale sta confermando il suo ruolo importante nel rendere il settore agroalimentare più sostenibile, efficiente e competitivo; gli agricoltori stanno investendo sempre di più in soluzioni digitali e adottandole, in particolare quelle che coinvolgono tecnologie come l’internet delle cose e la blockchain. Nonostante il crescente interesse per le applicazioni dell’intelligenza artificiale nel settore agroalimentare, le soluzioni abilitate dall’AI sono ancora poco esplorate e spiegate.
Questa tesi si propone di analizzare i benefici e i costi derivanti dall’uso di soluzioni di intelligenza artificiale applicate a diverse pratiche agricole, senza trascurare i rischi e le resistenze nell’adozione di tali soluzioni.
Questo lavoro è adatto sia a studenti provenienti da un background ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
L’innovazione digitale nell’agroalimentare sta diventando sempre più rilevante, poiché gli agricoltori adottano sempre più spesso tecnologie digitali e fanno affidamento su di esse per supportare le loro attività aziendali. Sebbene l’uso dell’innovazione digitale abbia dimostrato di generare benefici e rappresenti un potenziale motore per le aziende per migliorare le loro prestazioni e il vantaggio competitivo, gli studi hanno rilevato che sfruttare questo fenomeno comporta sia benefici che costi per le imprese.
Questa tesi mira a sviluppare un quadro capace di comprendere gli impatti derivanti dall’adozione dell’innovazione digitale nell’agroalimentare e gli ostacoli nel trasformare efficacemente i dati estratti in conoscenza che possa supportare azioni efficaci e generare un reale valore. Particolare attenzione sarà dedicata anche alla monetizzazione dei dati.
Questo lavoro è adatto sia a studenti provenienti da un background ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
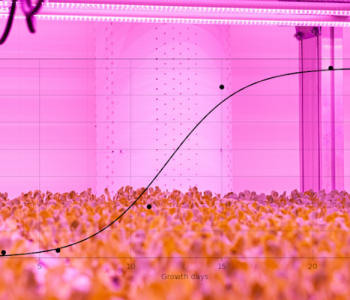
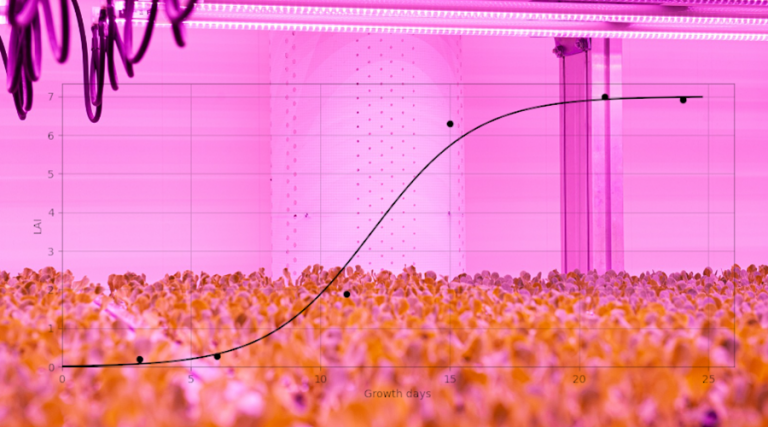
L’agricoltura in ambiente controllato consente di massimizzare le rese delle colture fornendo alle piante le condizioni di crescita ideali per 365 giorni all’anno, in maniera sostenibile e senza l’utilizzo di prodotti fitosanitari. Il massimo sfruttamento del potenziale produttivo della pianta, tuttavia, dipende dalla conoscenza della risposta di quest’ultima a un ampio spettro di stimoli ambientali, che può essere acquisita attraverso un lungo e costoso processo sperimentale. In questo contesto, i modelli biofisici di crescita delle piante, che si fondano sulle conoscenze di fisiologia e minimizzano la necessità di dati di calibrazione, rappresentano un’opportunità per velocizzare il processo di ottimizzazione su nuovi genotipi che vengono continuamente introdotti nel mercato. Questi modelli matematici sono stati sviluppati in condizioni di pieno campo, o in serra, e non sono attualmente disponibili per tutte le specie di interesse in indoor farming. Lo scopo di questo progetto di tesi è l’estensione dei modelli esistenti a nuove specie e/o tecniche di coltivazione utilizzate in ambiente controllato. La calibrazione e validazione dei modelli, eventualmente integrati con algoritmi di Machine Learning, sarà effettuata sperimentalmente in una vertical farm.
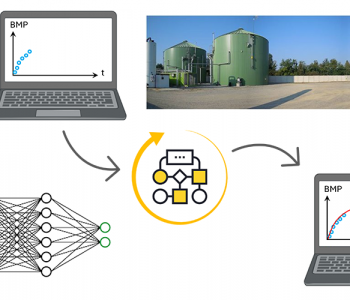
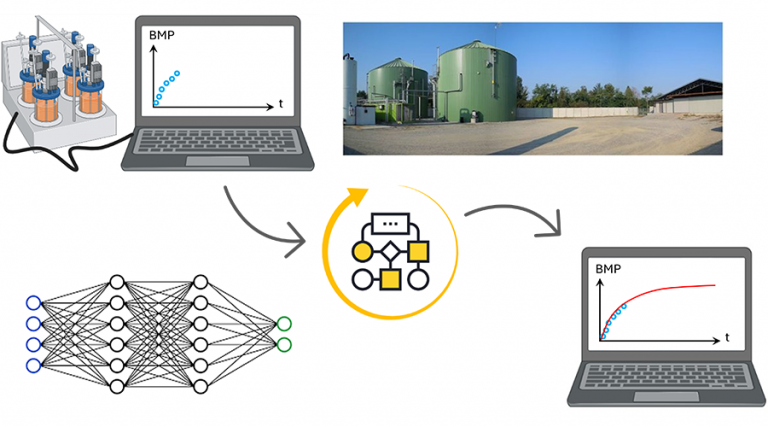
Il test del potenziale biochimico del metano (BMP) è uno strumento essenziale per ricavare conoscenze pratiche per l’ottimizzazione e il funzionamento di digestori anaerobici su larga scala, il monitoraggio, la modellazione e la valutazione delle prestazioni del processo o quando è in corso lo sviluppo di un’analisi di scenario. Sebbene la sua utilità sia indubbia, la lunga durata dei test BMP è problematica per molte delle sue applicazioni, soprattutto quando sono necessari risultati tempestivi per il processo decisionale. Negli ultimi decenni numerosi contributi scientifici hanno dimostrato che è possibile ridurre la durata dei test BMP prevedendo la produzione finale di gas. Lo scopo di questo lavoro di tesi è lo sviluppo di una nuova procedura/algoritmo per ottenere una stima preliminare del risultato sperimentale del BMP utilizzando il Machine Learning. L’efficacia e l’efficienza dell’algoritmo sviluppato saranno verificate utilizzando dati sperimentali provenienti da test BMP eseguiti su diversi substrati comunemente alimentati ai digestori anaerobici.
L’obiettivo della tesi è una revisione sistematica delle esperienze riguardanti gli effetti delle tecniche di agricoltura 4.0, dell’agricoltura intelligente e degli strumenti IOT applicati al settore agricolo, sui rilevanti impatti ambientali, climatici e di produttività. La sintesi della letteratura sarà la base di una pubblicazione scientifica in collaborazione con il Centro Comune di Ricerca della Commissione Europea.
Il lavoro prevede lo screening della letteratura scientifica primaria e secondaria esistente, utilizzando strumenti di intelligenza artificiale per automatizzare e accelerare lo screening delle pubblicazioni della letteratura pertinente. I dati ottenuti costituiranno la base per la modellizzazione a livello dell’UE delle potenzialità dell’agricoltura intelligente/di precisione per contribuire agli obiettivi dell’Unione europea nel contesto dell’agricoltura sostenibile e dell’azione per il clima.
Gli studenti apprenderanno metodi per la sintesi della conoscenza, la gestione dei dati e l’analisi delle prove scientifiche. Questo lavoro è adatto a studenti con un background ingegneristico e non ingegneristico e a un singolo studente o a un gruppo di due studenti. Sono preferibili competenze di programmazione (ad esempio R, Python).
L’automazione delle stalle si sta gradualmente diffondendo sempre di più. Tra le soluzioni offerte dal mercato troviamo, ad esempio, robot mobili per la pulizia della stalla e per la distribuzione del mangime. Tuttavia, queste soluzioni sono caratterizzate da un basso livello di automazione e, più in generale, da soluzioni tecnologiche estremamente semplici, che le rendono robuste ma poco flessibili.
Questo lavoro riguarda la progettazione e l’implementazione di un robot mobile autonomo, basato sul robot commerciale Agilex Bunker/Bunker Pro, per la distribuzione del mangime. Rispetto alle attuali soluzioni commerciali, il robot dovrà essere in grado di navigare autonomamente sia all’interno che all’esterno della stalla, senza richiedere infrastrutture dedicate (percorsi agevoli, speciali dispositivi di localizzazione, ecc.).
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Le tecniche di controllo basate su modello sono ampiamente utilizzate per la navigazione autonoma. L’MPC, in particolare, è una tecnica flessibile e potente che permette di considerare diversi obiettivi e vincoli di navigazione e di eseguire allo stesso tempo l’inseguimento della traiettoria e l’evitamento degli ostacoli. Inoltre, l’MPC può essere dotato di un modello del robot/veicolo che viene continuamente aggiornato/adattato alle condizioni mutevoli dell’ambiente, utilizzando tecniche di apprendimento, tenendo anche conto del livello di incertezza associato al modello stesso.
Questa tesi mira a sviluppare un controllore MPC per la navigazione autonoma di un robot cingolato. Il controllore sarà basato su un modello semplice del veicolo/robot e su algoritmi adeguati per adattarlo ai cambiamenti dell’ambiente. Inoltre, il controllore sarà finalizzato alla navigazione autonoma in ambienti agricoli, come la navigazione in filari e campi aperti. Il controllore sviluppato sarà validato in simulazione e/o sul campo utilizzando un robot cingolato Agilex Bunker o Bunker Pro.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Le tecniche di controllo basate su modello sono ampiamente utilizzate per la navigazione autonoma, ma per ottenere buone prestazioni in presenza di disturbi e incertezze è necessaria una stima e un adattamento online del modello. Le applicazioni agricole sono un esempio tipico in cui la variabilità dell’ambiente e la complessità del modello di interazione ruota/terreno richiedono un approccio basato su un modello semplice del robot/veicolo, dotato di algoritmi in grado di adattare/migliorare continuamente questo modello utilizzando tutte le misure disponibili.
Questa tesi mira a sviluppare tecniche classiche e di machine/deep learning per stimare online lo slittamento di un cingolo, costituendo l’elementao fondamentale per la creazione di un controllore per la navigazione autonoma di un robot skid-steering per applicazioni offroad/agricole. Verranno presi in considerazione diversi sensori, a partire dallo stato del robot e dalle informazioni fornite da una IMU, fino alle immagini del terreno generate da una telecamera RGBD o da un lidar. Un aspetto chiave della tesi sarà il confronto tra tecniche classiche e basate su learning, al fine di scoprire l’eventuale valore aggiunto di queste ultime. Gli algoritmi sviluppati saranno validati in simulazione e/o sul campo utilizzando un robot cingolato.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti. E’ necessaria la conoscenza di Python.
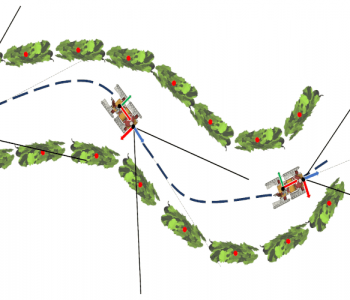
Localizzazione e mapping sono due parti fondamentali del sistema di navigazione di un robot autonomo. Il mapping è la procedura che permette al robot, utilizzando i sensori disponibili, di generare una mappa dell’ambiente. La localizzazione, invece, è la procedura che permette al robot, utilizzando i suoi sensori e una mappa dell’ambiente, di determinare la sua posizione e il suo orientamento rispetto a un sistema di riferimento fisso.
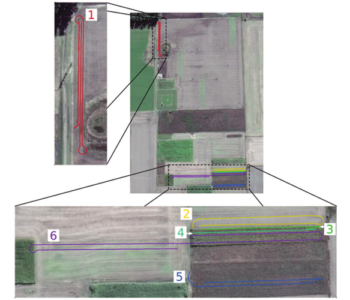
Localizzazione e mapping sono necessari per navigare autonomamente in un vigneto? Abbiamo davvero bisogno di creare una mappa del vigneto con i sensori o possiamo affidarci alla struttura nota dei filari? Abbiamo davvero bisogno di un algoritmo di localizzazione complesso o possiamo basarci solo sulle misurazioni GPS? Gli approcci di localizzazione e mapping che vengono solitamente adottati nella robotica, nei veicoli autonomi o in pieno campo sono adatti per il vigneto, o possiamo utilizzare approcci più semplici che siano in grado di sfruttare, per quanto possibile, la struttura dei filari? Utilizzare l’intelligenza artificiale aiuta?
Questo lavoro mira a rispondere a una o più delle domande precedenti per mettere a punto tecniche di localizzazione e mapping semplici, efficienti e affidabili per navigare autonomamente in un vigneto.
Questo lavoro è adatto per studenti provenienti da un percorso ingegneristico e con esperienza nell’utilizzo del linguaggio C, C++ o Python. Un gruppo formato da due studenti, uno proveniente da un percorso ingegneristico e uno da un percorso non ingegneristico, rappresenta la miglior soluzione.
Per progettare un sistema di controllo è necessario, innanzitutto, sviluppare il modello del sistema da controllare. Tale modello è utile per studiare le proprietà del sistema, per progettare il regolatore, e per effettuare una validazione preliminare in simulazione del sistema di controllo stesso.
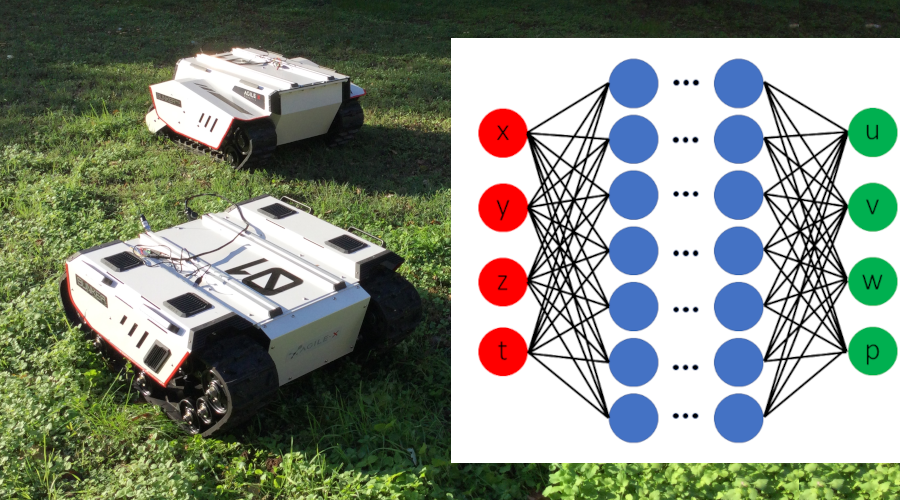
Talvolta, pero’, il modello fisico risulta troppo complesso e richiede tempi di computazione eccessivamente lunghi. In questo caso l’utilizzo delle reti neurali permette di ottenere un modello ugualmente accurato ma molto più efficiente.
Questa tesi si propone di ricavare un modello di un robot cingolato Agilex utilizzato reti neurali PINN (Physics-Informed Neural Networks), a partire da un modello fisico sviluppato in un lavoro di tesi precedente e dai dati sperimentali. Il modello sarà poi validato sperimentalmente confrontando il comportamento del robot simulato con quello di una piattaforma reale.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Il potenziale delle energie rinnovabili nel settore agricolo, a livello delle aziende agricole, non è ancora pienamente sfruttato e si prevedono opportunità per sviluppare soluzioni interessanti in questo settore. La tesi analizzerà la fattibilità dello sviluppo di tecnologie di energia rinnovabile nel contesto delle aziende agricole. Le migliori pratiche e le configurazioni più avanzate di aziende agricole basate su fonti rinnovabili saranno esaminate a livello dell’UE. Verranno studiati diversi casi studio (in termini di scala aziendale, tipologia e ubicazione) a livello italiano (possibilità di collaborare con un’azienda agricola reale da verificare). Verranno prese in considerazione soluzioni di stoccaggio dell’energia per ridurre l’effetto della mancata dispacciabilità delle fonti rinnovabili, aumentando al contempo l’autoconsumo di elettricità e calore su scala agricola. Verrà inoltre studiato l’uso efficiente delle risorse energetiche e l’applicazione di nuove tecnologie energetiche e strumenti digitali.
La crescita della popolazione, il cambiamento dell’alimentazione e dello stile di vita, l’agricoltura moderna e l’allevamento intensivo di bestiame sono i principali fattori responsabili dell’aumento della produzione alimentare osservato negli ultimi 50 anni, che ha raggiunto circa 24 milioni di tonnellate di cibo al giorno in tutto il mondo. L’uso eccessivo associato di fertilizzanti chimici nel settore agricolo provoca elevati impatti ambientali, come l’eutrofizzazione e le emissioni di gas serra, insieme allo sfruttamento del suolo, dell’acqua e delle risorse naturali. Inoltre, come risultato delle attività agricole, viene generata un’enorme quantità di rifiuti, con letame di bestiame come contributo principale. Pertanto, sono necessarie soluzioni sostenibili innovative per ridurre la pressione sulle risorse limitate, per diminuire la quantità di input chimici in agricoltura e per promuovere una gestione più responsabile dei rifiuti. Nell’ottica dell’economia circolare, il riutilizzo e la valorizzazione dei rifiuti agricoli sono di fondamentale importanza per favorire la produzione di fertilizzanti a base biologica. Inoltre, le tecnologie di trattamento dei rifiuti, come la digestione anaerobica e la carbonizzazione idrotermale, rappresentano una soluzione per stimolare il recupero di materia ed energia. I nutrienti, come fosforo, azoto e potassio, possono essere recuperati dal letame per produrre ingredienti fertilizzanti di alta qualità, come struvite e K-struvite. Lo scopo della tesi è quello di studiare diverse strategie per il recupero dei nutrienti da tale fonte secondaria. Le attività sperimentali saranno svolte su scala di laboratorio, al fine di sviluppare tecnologie innovative da scalare nell’ambiente pertinente, in collaborazione con le parti interessate industriali. Una possibile via di recupero riguarderà il recupero di azoto e fosforo dalla frazione liquida del digestato mediante precipitazione selettiva, scambio ionico o altre tecniche di separazione/purificazione. Il recupero sarà ottimizzato per massimizzare l’efficienza di recupero dei nutrienti e le caratteristiche dei prodotti recuperati, riducendo al minimo l’aggiunta di prodotti chimici e l’uso di energia, per garantire la fattibilità tecnico-economica della soluzione e la sostenibilità ambientale.
Tra i diversi flussi di rifiuti, i rifiuti organici agroalimentari sono diventati sempre più rilevanti a causa delle significative conseguenze ambientali derivanti da un trattamento e uno smaltimento impropri. Il recupero delle risorse da tali flussi di rifiuti organici, trasformando i rifiuti in risorse preziose (come bioplastiche, biocarburanti, proteine unicellulari e biostimolanti), può rappresentare una soluzione promettente per ridurre gli impatti ambientali legati allo smaltimento dei rifiuti e al consumo di risorse naturali. L’applicazione innovativa dei batteri fototrofici viola (PPB) per il recupero delle risorse da vari flussi di rifiuti organici, in particolare come coltura mista microbica cresciuta attraverso il metabolismo fotoeterotrofico, sta attirando una notevole attenzione. Infatti, utilizzando la luce solare come fonte di energia, il PPB è in grado di assimilare contemporaneamente carbonio e nutrienti ad alta efficienza, massimizzando al contempo il recupero delle risorse. Poiché l’uso del PPB per il trattamento dei flussi di rifiuti organici ad alto tasso e il recupero delle risorse è ancora nelle sue fasi iniziali, gli obiettivi primari di questo progetto sono (i) migliorare la comprensione dei meccanismi di crescita del PPB sui rifiuti organici agroalimentari attraverso una sperimentazione combinata e approccio di modellazione, e (ii) studiare l’integrazione del recupero delle risorse da parte del PPB nei layout degli impianti esistenti, al fine di migliorare le prestazioni del processo e promuovere uno scale-up sostenibile. A tal fine, saranno progettati e gestiti reattori su scala di laboratorio per la coltivazione di PPB per identificare le condizioni operative ottimali. Inoltre, verrà valutato il recupero delle risorse, possibilmente guardando all’accumulo di biopolimeri nella biomassa e nella produzione di proteine. Infine, sulla base dei risultati sperimentali e modellistici, sarà progettato e sviluppato un fotobioreattore ottimizzato su scala pilota.
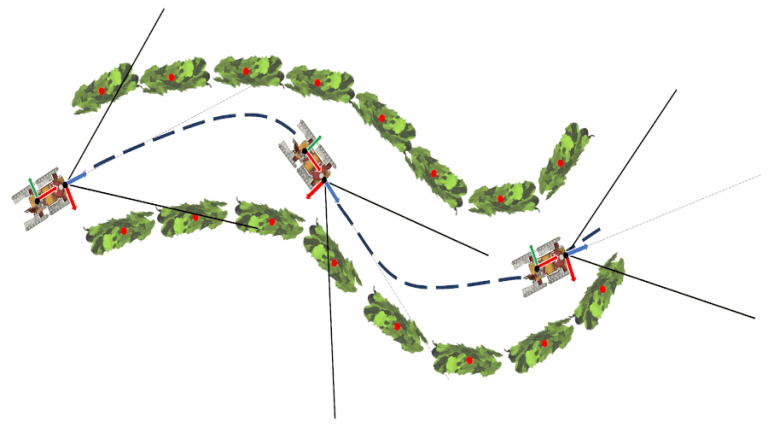
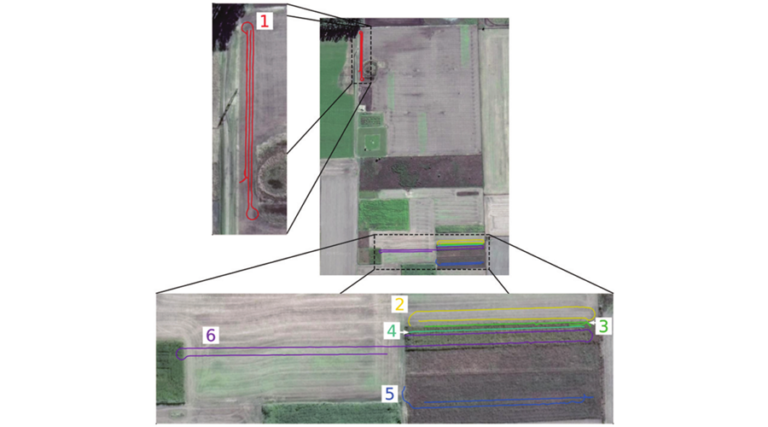
Localizzazione e mapping sono due parti fondamentali del sistema di navigazione di un robot autonomo. Il mapping è la procedura che permette al robot di costruire una mappa dell’ambiente, utilizzando tutti i sensori disponibili. La localizzazione, invece, è la procedura che permette ad un robot di determinare la propria posizione ed il proprio orientamento rispetto ad un sistema di riferimento fisso, utilizzando i sensori disponibili e la mappa dell’ambiente. Queste due procedure, che in generale non sono semplici da eseguire, sono particolarmente complesse nel caso di navigazione in ambiente agricolo, poichè esso è caratterizzato da condizioni di luminosità difficili variabilità stagionale, e, in generale, dalla complessità che caratterizza l’ambiente naturale.
Questa tesi si propone di implementare e confrontare le prestazioni di differenti algorithmi di localizzazione e mapping, o di algoritmi che permettono di eseguire simultaneamente localizzazione e mapping, utilizzando alcuni dataset specifici per robotica agricola.
Questo lavoro è adatto per studenti provenienti da un percorso ingegneristico e con esperienza nell’utilizzo del linguaggio C, C++ o Python. Un gruppo formato da due studenti, uno proveniente da un percorso ingegneristico e uno da un percorso non ingegneristico, rappresenta la miglior soluzione.
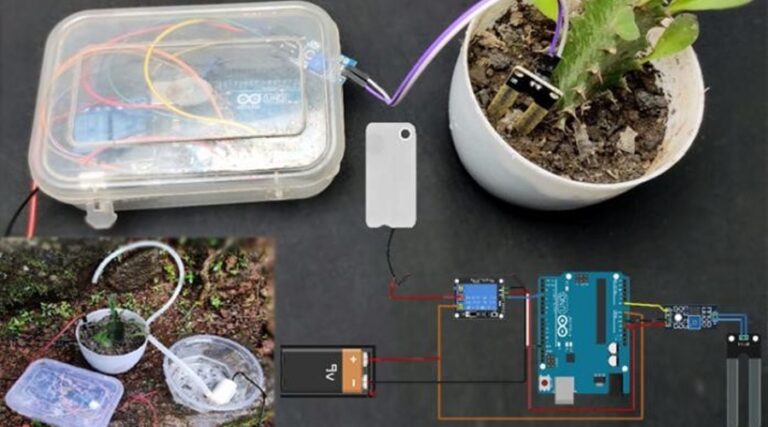
Questa tesi si propone di realizzare semplici dispositivi sperimentali ed attività sperimentali da effettuare con tali dispositivi, relativi all’applicazione di tecniche di controllo logico e modulante applicate a sistemi di automazione in agricoltura, per supportare i laboratori del corso Control Systems for Smart Agriculture. Un esempio di questi dispositivi è rappresentato da un sistema di irrigazione automatica, composto da uno o più serbatoi con controllo di livello, una o più pompe con controllo di portata, un sensore di umidità, etc.
Il lavoro comprende la realizzazione del dispositivo sperimentale e di un modello validato sperimentalmente, il progetto del sistema di controllo, la sua implementazione su Arduino, e la sua validazione in simulazione e sperimentale.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Ogni volta che si deve progettare un sistema di controllo, è necessario prima realizzare un modello dell’impianto, che consenta di studiarne le proprietà, progettare il controllore ed eseguire una validazione preliminare, in simulazione, del sistema di controllo. Nel caso di robot/macchine agricole, il modello può essere utilizzato anche per testare diversi progetti meccanici.
Questa tesi mira a sviluppare il modello di un robot Agilex, adatto a compiti fuoristrada, inclusi i modelli di terreni con diverse caratteristiche meccaniche, utilizzando il linguaggio Modelica. Il simulatore viene quindi validato confrontando il comportamento del robot simulato con il comportamento di una piattaforma reale.
Questo lavoro è adatto a studenti con un background ingegneristico o non ingegneristico e a un singolo studente o a un gruppo di due studenti.
Per progettare un sistema di controllo è necessario, innanzitutto, sviluppare il modello del sistema da controllare. Tale modello è utile per studiare le proprietà del sistema, per progettare il regolatore, e per effettuare una validazione preliminare in simulazione del sistema di controllo stesso.
Nel caso dei robot e delle macchine agricole, il modello può essere utilizzato anche per verificare il risultato di differenti approcci alla progettazione meccanica del sistema. Per fare questo, e per validare il sistema di controllo in un contesto realistico, è pero’ necessario disporre anche di un modello accuratodel terreno.
Questa tesi si propone di estendere il modello di un robot cingolato Agilex, sviluppato in un lavoro di tesi precedente, includendo un modello accurato di terreno.
Il modello sarà poi validato sperimentalmente confrontando il comportamento del robot simulato con quello di una piattaforma reale.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Docente di riferimento: Prof. Gianni Ferretti – gianni.ferretti@polimi.it
 P22/23
P22/23