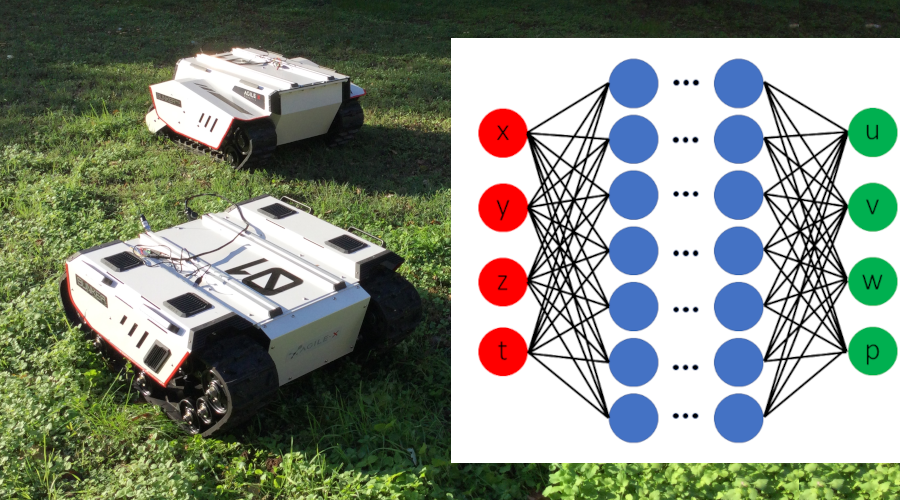
Utilizzare reti neurali PINN per modellizzare un robot agricolo
Per progettare un sistema di controllo è necessario, innanzitutto, sviluppare il modello del sistema da controllare. Tale modello è utile per studiare le proprietà del sistema, per progettare il regolatore, e per effettuare una validazione preliminare in simulazione del sistema di controllo stesso.
Talvolta, pero’, il modello fisico risulta troppo complesso e richiede tempi di computazione eccessivamente lunghi. In questo caso l’utilizzo delle reti neurali permette di ottenere un modello ugualmente accurato ma molto più efficiente.
Questa tesi si propone di ricavare un modello di un robot cingolato Agilex utilizzato reti neurali PINN (Physics-Informed Neural Networks), a partire da un modello fisico sviluppato in un lavoro di tesi precedente e dai dati sperimentali. Il modello sarà poi validato sperimentalmente confrontando il comportamento del robot simulato con quello di una piattaforma reale.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.