L’automazione delle stalle si sta gradualmente diffondendo sempre di più. Tra le soluzioni offerte dal mercato troviamo, ad esempio, robot mobili per la pulizia della stalla e per la distribuzione del mangime. Tuttavia, queste soluzioni sono caratterizzate da un basso livello di automazione e, più in generale, da soluzioni tecnologiche estremamente semplici, che le rendono robuste ma poco flessibili.
Questo lavoro riguarda la progettazione e l’implementazione di un robot mobile autonomo, basato sul robot commerciale Agilex Bunker/Bunker Pro, per la distribuzione del mangime. Rispetto alle attuali soluzioni commerciali, il robot dovrà essere in grado di navigare autonomamente sia all’interno che all’esterno della stalla, senza richiedere infrastrutture dedicate (percorsi agevoli, speciali dispositivi di localizzazione, ecc.).
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Le tecniche di controllo basate su modello sono ampiamente utilizzate per la navigazione autonoma. L’MPC, in particolare, è una tecnica flessibile e potente che permette di considerare diversi obiettivi e vincoli di navigazione e di eseguire allo stesso tempo l’inseguimento della traiettoria e l’evitamento degli ostacoli. Inoltre, l’MPC può essere dotato di un modello del robot/veicolo che viene continuamente aggiornato/adattato alle condizioni mutevoli dell’ambiente, utilizzando tecniche di apprendimento, tenendo anche conto del livello di incertezza associato al modello stesso.
Questa tesi mira a sviluppare un controllore MPC per la navigazione autonoma di un robot cingolato. Il controllore sarà basato su un modello semplice del veicolo/robot e su algoritmi adeguati per adattarlo ai cambiamenti dell’ambiente. Inoltre, il controllore sarà finalizzato alla navigazione autonoma in ambienti agricoli, come la navigazione in filari e campi aperti. Il controllore sviluppato sarà validato in simulazione e/o sul campo utilizzando un robot cingolato Agilex Bunker o Bunker Pro.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
Le tecniche di controllo basate su modello sono ampiamente utilizzate per la navigazione autonoma, ma per ottenere buone prestazioni in presenza di disturbi e incertezze è necessaria una stima e un adattamento online del modello. Le applicazioni agricole sono un esempio tipico in cui la variabilità dell’ambiente e la complessità del modello di interazione ruota/terreno richiedono un approccio basato su un modello semplice del robot/veicolo, dotato di algoritmi in grado di adattare/migliorare continuamente questo modello utilizzando tutte le misure disponibili.
Questa tesi mira a sviluppare tecniche classiche e di machine/deep learning per stimare online lo slittamento di un cingolo, costituendo l’elementao fondamentale per la creazione di un controllore per la navigazione autonoma di un robot skid-steering per applicazioni offroad/agricole. Verranno presi in considerazione diversi sensori, a partire dallo stato del robot e dalle informazioni fornite da una IMU, fino alle immagini del terreno generate da una telecamera RGBD o da un lidar. Un aspetto chiave della tesi sarà il confronto tra tecniche classiche e basate su learning, al fine di scoprire l’eventuale valore aggiunto di queste ultime. Gli algoritmi sviluppati saranno validati in simulazione e/o sul campo utilizzando un robot cingolato.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti. E’ necessaria la conoscenza di Python.
Localizzazione e mapping sono due parti fondamentali del sistema di navigazione di un robot autonomo. Il mapping è la procedura che permette al robot, utilizzando i sensori disponibili, di generare una mappa dell’ambiente. La localizzazione, invece, è la procedura che permette al robot, utilizzando i suoi sensori e una mappa dell’ambiente, di determinare la sua posizione e il suo orientamento rispetto a un sistema di riferimento fisso.
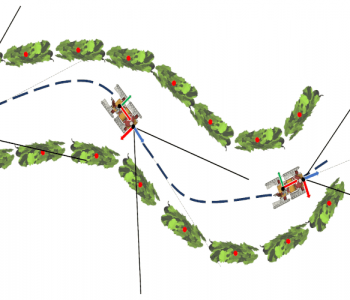
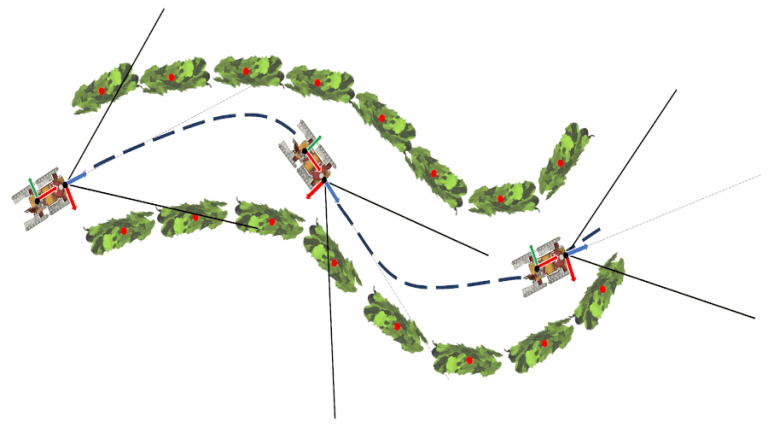
Localizzazione e mapping sono necessari per navigare autonomamente in un vigneto? Abbiamo davvero bisogno di creare una mappa del vigneto con i sensori o possiamo affidarci alla struttura nota dei filari? Abbiamo davvero bisogno di un algoritmo di localizzazione complesso o possiamo basarci solo sulle misurazioni GPS? Gli approcci di localizzazione e mapping che vengono solitamente adottati nella robotica, nei veicoli autonomi o in pieno campo sono adatti per il vigneto, o possiamo utilizzare approcci più semplici che siano in grado di sfruttare, per quanto possibile, la struttura dei filari? Utilizzare l’intelligenza artificiale aiuta?
Questo lavoro mira a rispondere a una o più delle domande precedenti per mettere a punto tecniche di localizzazione e mapping semplici, efficienti e affidabili per navigare autonomamente in un vigneto.
Questo lavoro è adatto per studenti provenienti da un percorso ingegneristico e con esperienza nell’utilizzo del linguaggio C, C++ o Python. Un gruppo formato da due studenti, uno proveniente da un percorso ingegneristico e uno da un percorso non ingegneristico, rappresenta la miglior soluzione.
Per progettare un sistema di controllo è necessario, innanzitutto, sviluppare il modello del sistema da controllare. Tale modello è utile per studiare le proprietà del sistema, per progettare il regolatore, e per effettuare una validazione preliminare in simulazione del sistema di controllo stesso.
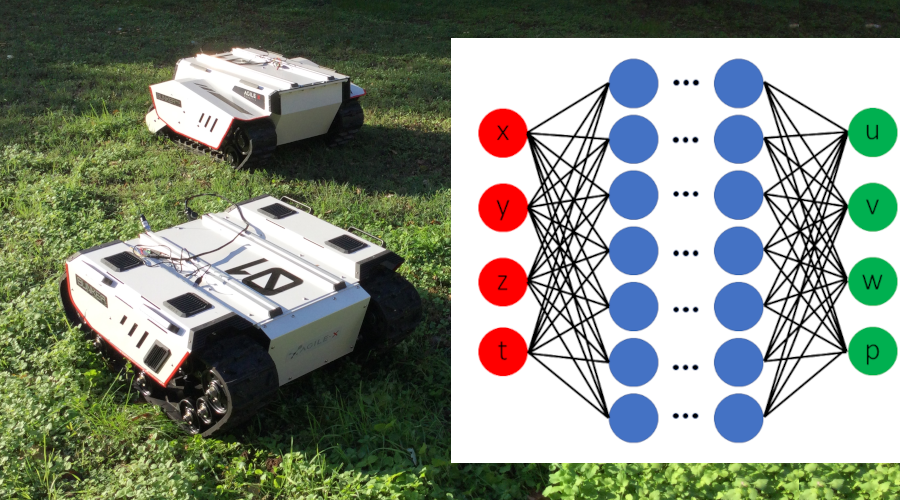
Talvolta, pero’, il modello fisico risulta troppo complesso e richiede tempi di computazione eccessivamente lunghi. In questo caso l’utilizzo delle reti neurali permette di ottenere un modello ugualmente accurato ma molto più efficiente.
Questa tesi si propone di ricavare un modello di un robot cingolato Agilex utilizzato reti neurali PINN (Physics-Informed Neural Networks), a partire da un modello fisico sviluppato in un lavoro di tesi precedente e dai dati sperimentali. Il modello sarà poi validato sperimentalmente confrontando il comportamento del robot simulato con quello di una piattaforma reale.
Questo lavoro è adatto sia per studenti provenienti da un percorso ingegneristico che non ingegneristico, e può essere affrontato sia da un singolo studente che da un gruppo di due studenti.
 Sedute CCS
Sedute CCS