Using PINN neural networks to model an agricultural robot
To design a control system it is necessary, first of all, to develop the model of the system to be controlled. This model is useful for studying the properties of the system, for designing the regulator, and for carrying out a preliminary validation in simulation of the control system itself.
Sometimes, however, the physical model is too complex and requires excessively long computation times. In this case, the use of neural networks allows us to obtain an equally accurate but much more efficient model.
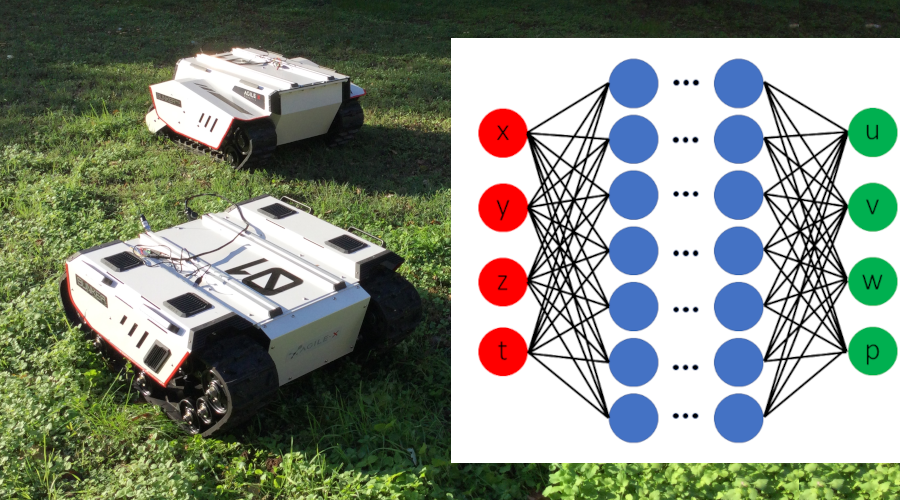
This thesis aims to derive a model of an Agilex tracked robot using PINN neural networks (Physics-Informed Neural Networks), starting from a physical model developed in a previous thesis work and from experimental data. The model will then be validated experimentally by comparing the behavior of the simulated robot with that of a real platform.
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students.