Digital innovation is confirming its important role in making the agrifood sector more sustainable, efficient and competitive; farmers are increasingly investing in and adopting digital solutions, especially involving technologies such as the internet of things and blockchain. Despite a growing interest in the applications of Artificial Intelligence in the agrifood sector, AI-enabled solutions are still not explored and explained.
This thesis aims at analyzing the benefits and costs derived from the use of Artificial Intelligence solutions applied to different agricultural practices, without overlooking their risks and resistance to adopt them.
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students.
Digital Innovation in agrifood is becoming more and more relevant, since farmers increasingly adopt digital technologies and rely on them to support their business activities. Even though the exploitation of digital innovation has proven to generate benefits and to be a potential engine for businesses to improve their performance and competitive advantage, studies have found that leveraging this phenomenon has both benefits and costs for businesses.
This thesis aims at developing a framework able to understand the impacts derived from the adoption of digital innovation in agrifood, and the obstacles to effectively turn extracted data into knowledge that can support effective actions and generate real value. A particular attention will be devoted also to data monetization.
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students.
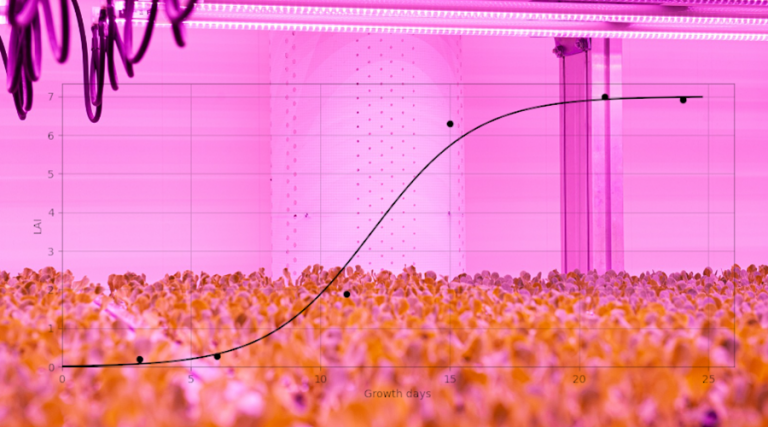
Controlled environment agriculture allows to maximize crop yields by providing plants with ideal growth conditions for 365 days a year, in a sustainable way and without the use of pesticides. The maximum exploitation of the productive potential of the plant, however, depends on the knowledge of the response of the latter to a wide spectrum of environmental stimuli, which can be acquired through a long and expensive experimental process. In this context, biophysical models of plant growth, which are based on physiological knowledge and minimize the need for calibration data, represent an opportunity to speed up the optimization process on new genotypes that are continuously introduced into the market. These mathematical models have been developed in open field conditions, or in greenhouses, and are not currently available for all species of interest in indoor farming. The aim of this thesis project is to extend the existing models to new species and/or cultivation techniques used in controlled environments. The calibration and validation of the models, possibly integrated with Machine Learning algorithms, will be carried out experimentally in a vertical farm.
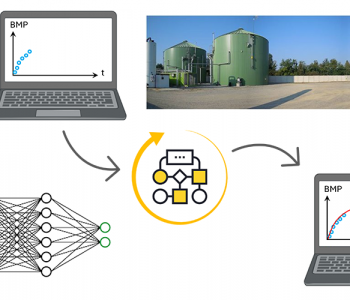
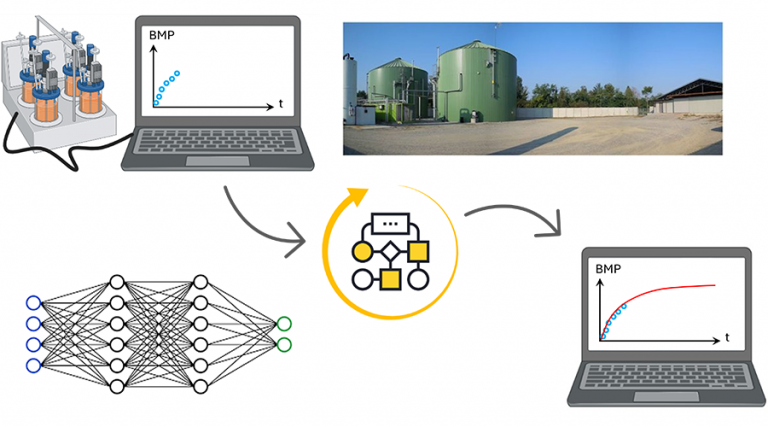
Biochemical Methane Potential (BMP) testing is an essential tool for deriving practical knowledge for optimizing and operating large-scale anaerobic digesters, monitoring, modeling and evaluating process performance, or when it is ongoing the development of a scenario analysis. While its usefulness is undoubted, the long duration of BMP testing is problematic for many of its applications, especially when timely results are required for decision making. In recent decades, numerous scientific contributions have demonstrated that a reduction in BMP test duration is possible by predicting the final gas production. The aim of this thesis work is the development of a new procedure/algorithm to obtain a preliminary estimate of the BMP experimental result using Machine Learning. The effectiveness and efficiency of the developed algorithm will be verified using experimental data from BMP tests performed on different substrates commonly fed to anaerobic digesters.
This thesis aims at performing a systematic review of the existing evidence regarding the effects of agriculture 4.0 techniques, smart-agriculture and IOT-tools applied to the agricultural sector, on relevant environmental, climatic and productivity impacts. The literature synthesis will be the basis of a scientific publication in collaboration with the Joint Research Center of the European Commission.
The work includes the screening of existing primary and secondary scientific literature, using artificial intelligence tools to automize and speed-up the screening of relevant literature records. The obtained data will constitute the basis for EU-wide modelling of the potentials of smart/precision farming to contribute to the European Union’s goals in the context of sustainable agriculture and climate action.
The students will learn about methods for knowledge synthesis, data management and scientific evidence analysis. This work is suitable for students with an engineering or non engineering background, and for a single student or for a group of two students. Backgrounds of coding skills (e.g. R, Python) are preferred.
Barn automation is gradually becoming more and more widespread. Among the solutions offered by the market we find, for example, mobile robots for cleaning stables and distributing feed. However, these solutions are characterized by a low level of automation and, more generally, by extremely simple technological solutions, which make them robust but not very flexible.
This work concerns the design and implementation of an autonomous mobile robot, based on the commercial Agilex Bunker/Bunker Pro robot, for feed distribution. Compared to current commercial solutions, the robot must be able to navigate autonomously both inside and outside the stable, without requiring dedicated infrastructure (easy routes, special localization devices, etc.).
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students.
Model-based control techniques are widely used for autonomous navigation. MPC, in particular, is a flexible and powerful technique that allows considering different navigation objectives and constraints and performing trajectory tracking and obstacle avoidance at the same time. Furthermore, the MPC can be equipped with a model of the robot/vehicle that is continuously updated/adapted to changing conditions of the environment, using learning techniques, also taking into account the level of uncertainty associated with the model itself.
This thesis aims to develop an MPC controller for the autonomous navigation of a tracked robot. The controller will be based on a simple model of the vehicle/robot and on adequate algorithms to adapt it to changes in the environment. Furthermore, the controller will be aimed at autonomous navigation in agricultural environments, such as navigation in rows and open fields. The developed controller will be validated in simulation and/or in the field using an Agilex Bunker or Bunker Pro tracked robot.
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students.
Model-based control techniques are widely used for autonomous navigation, but achieving good performance in the presence of disturbances and uncertainties requires online estimation and adaptation of the model. Agricultural applications are a typical example where the variability of the environment and the complexity of the wheel/terrain interaction model require an approach based on a simple model of the robot/vehicle, equipped with algorithms capable of continuously adapting/improving this model using all sizes available.
This thesis aims to develop classical and machine/deep learning techniques to estimate online the slip of a track, constituting the fundamental element for the creation of a controller for the autonomous navigation of a skid-steering robot for offroad/agricultural applications. Different sensors will be taken into consideration, starting from the state of the robot and the information provided by an IMU, up to the images of the terrain generated by an RGBD camera or a lidar. A key aspect of the thesis will be the comparison between classical and learning-based techniques, in order to discover any added value of the latter. The developed algorithms will be validated in simulation and/or in the field using a tracked robot.
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students. Knowledge of Python is required.
Localization and mapping are two fundamental parts of the navigation system of an autonomous robot. Mapping is the procedure that allows the robot, using the available sensors, to generate a map of the environment. Localization, on the other hand, is the procedure that allows the robot, using its sensors and a map of the environment, to determine its position and orientation with respect to a fixed reference system.
Are localization and mapping necessary to autonomously navigate a vineyard? Do we really need to create a map of the vineyard with sensors or can we rely on the known structure of the rows? Do we really need a complex localization algorithm or can we just rely on GPS measurements? Are the localization and mapping approaches that are usually adopted in robotics, autonomous vehicles or in the open field suitable for the vineyard, or can we use simpler approaches that are able to exploit, as much as possible, the structure of the rows? Does using artificial intelligence help?
This work aims to answer one or more of the previous questions to develop simple, efficient and reliable localization and mapping techniques to autonomously navigate a vineyard.
This work is suitable for students coming from an engineering background and with experience in using the C, C++ or Python language. A group made up of two students, one from an engineering background and one from a non-engineering background, represents the best solution.
To design a control system it is necessary, first of all, to develop the model of the system to be controlled. This model is useful for studying the properties of the system, for designing the regulator, and for carrying out a preliminary validation in simulation of the control system itself.
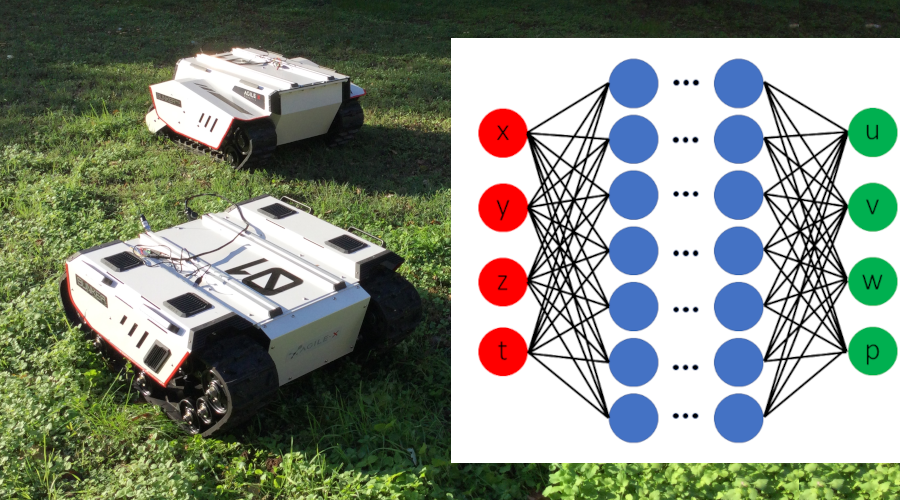
Sometimes, however, the physical model is too complex and requires excessively long computation times. In this case, the use of neural networks allows us to obtain an equally accurate but much more efficient model.
This thesis aims to derive a model of an Agilex tracked robot using PINN neural networks (Physics-Informed Neural Networks), starting from a physical model developed in a previous thesis work and from experimental data. The model will then be validated experimentally by comparing the behavior of the simulated robot with that of a real platform.
This work is suitable for both students coming from an engineering and non-engineering background, and can be tackled both by a single student and by a group of two students.
The renewable energy potential in the agricultural sector, at farm-level, is not yet fully exploited and opportunities are foreseen to develop interesting solutions in this area. The thesis will analyze the feasibility of developing renewable energy technologies in the context of farms. Best practices and the most advanced renewable-based farm configurations will be reviewed at the EU level. Different case studies (in terms of farm scale, type and location) will be investigated at the Italian level (possibility to collaborate with a real farm to be verified). Energy storage solutions for reducing the effect of non-dispatchability of renewable sources, while increasing the self-use of electricity and heat at the farm scale, will be considered. Moreover, the efficient use of energy resources and the application of new energy technologies and digital tools will be studied.
Population growth, changing in diet and lifestyle, modern agriculture and intensive livestock farming are the main drivers responsible for the increase in food production observed in the last 50 years, which reached approximately 24 million tons of food per day worldwide. The associated excessive use of chemical fertilizers in the agricultural sector causes high environmental impacts, such as eutrophication and greenhouse gas emissions, along with the exploitation of soil, water and natural resources. Furthermore, as a results of the agricultural activities, huge amount of waste is generated, with livestock manure as main contributor. Thus, innovative sustainable solutions are required to reduce the pressure on finite resources, to decrease the amount of chemical input in agriculture, and to promote a more responsible management of waste. In the view of circular economy, re-use and valorisation of agricultural waste are of paramount importance to foster the production of bio-based fertilisers. In addition, waste treatment technologies, such as anaerobic digestion and hydrothermal carbonization, represent a solution to stimulate material and energy recovery. Nutrients, such as phosphorus, nitrogen and potassium, can be recovered from livestock manure to produce high-quality fertilizer ingredients, as struvite and K-struvite. The purpose of the M.Sc. thesis is to investigate different strategies for nutrient recovery from such secondary source. Experimental activities will be performed at the lab-scale in the view of developing innovative technologies to scale-up in relevant environment in cooperation with industrial stakeholders. A possible recovery route will concern the recovery of nitrogen and phosphorus from the liquid fraction of digestate via selective precipitation, ion exchange or other separation/purification techniques. The recovery will be optimized to maximize the nutrients recovery efficiency and recovered products characteristics, while minimizing the addition of chemicals and the use of energy, to guarantee solution techno-economic feasibility and environmental sustainability.
Among different waste streams, agri-food biowaste has become increasingly more relevant due to the significant environmental consequences resulting from improper treatment and disposal. Resource recovery from such biowaste streams, turning waste into valuable resources (such as bioplastics, biofuels, single cell proteins and biostimulants), can represent a promising solution to reduce environmental impacts related to waste disposal and natural resource consumption. The innovative application of purple phototrophic bacteria (PPB) for resource recovery from various biowaste streams, particularly as microbial mixed culture grown via photoheterotrophic metabolism, is drawing considerable attention. In fact, by using solar light as energy source, PPB can simultaneously assimilate carbon and nutrients at high efficiencies, while maximizing the recovery of resources. As the use of PPB for high-rate biowaste stream treatment and resource recovery is still in its early stages, the primary goals of this project are (i) to improve the understanding of mechanisms of PPB growth on agri-food biowaste through a combined experimental and modelling approach, and (ii) to investigate the integration of resource recovery by PPB in existing plant layouts, in the view of enhancing process performance and promoting sustainable scale-up. To this end, lab-scale reactors for PPB cultivation will be designed and operated to identify the optimal operating conditions. Moreover, resource recovery will be evaluated, possibly looking at biopolymer accumulation in biomass and protein production. Finally, based on the experimental and modelling results, a pilot-scale optimized photobioreactor will be designed and developed.
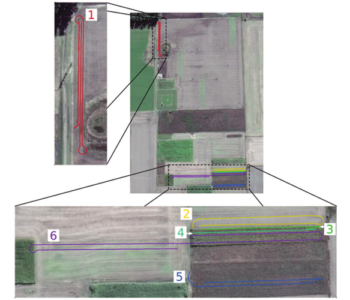
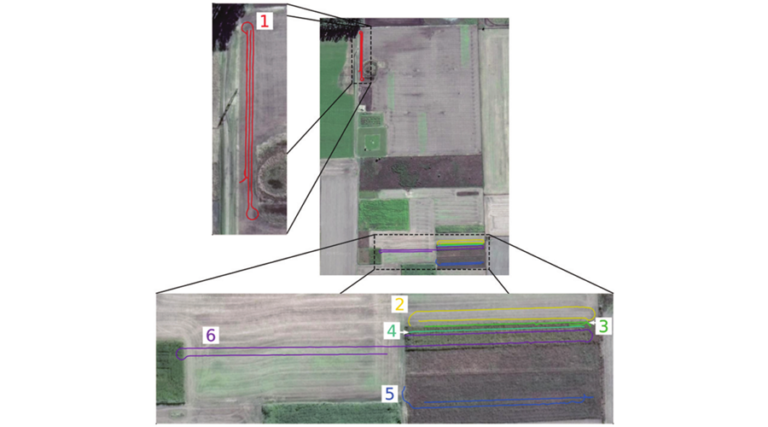
Localization and mapping are two fundamental parts of the navigation system of an autonomous robot. Mapping is the procedure that allows the robot, using the available sensors, to generate a map of the environment. Localization, instead, is the procedure that allows the robot, using its sensors and a map of the environment, to determine its position and orientation with respect to a fixed reference frame. These two tasks, that are always not easy, are particularly complex when an outdoor agricultural scenario is considered, due to the light conditions, the seasonal variability, and the overall complexity of the natural environment.
This thesis aims at setting up and comparing the performance of different localization and mapping algorithms, or of simultaneous localization and mapping algorithms on some realistic agricultural datasets.
This work is more suitable for students with an engineering background and with a previous experience in coding using C, C++ or Python. A group of two students, one with an engineering background and one with a non engineering background would be the best choice.
The Biochemical Methane Potential (BMP) test is an essential tool to derive practical knowledge for optimizing and operating full-scale anaerobic digesters, monitoring, modelling, and evaluating process performances, or when a scenario analysis is being developed. Despite its usefulness is undoubted, long duration of BMP tests is problematic for many of its applications, especially when prompt results to take decisions are required. Over the last decades, several scientific contributions demonstrated that a reduction of BMP test duration is possible by predicting the final gas production. The purpose of this thesis work is the development of a new procedure/algorithm to obtain a preliminary estimation of the experimental BMP result by using a linear fractional transformation (LFT) formulation of the original nonlinear model for the identification of its parameters. The efficacy and the efficiency of the algorithm developed will be verified using experimental data of BMP tests performed on different substrates commonly fed to anaerobic digesters.
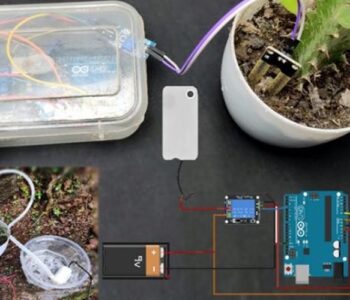
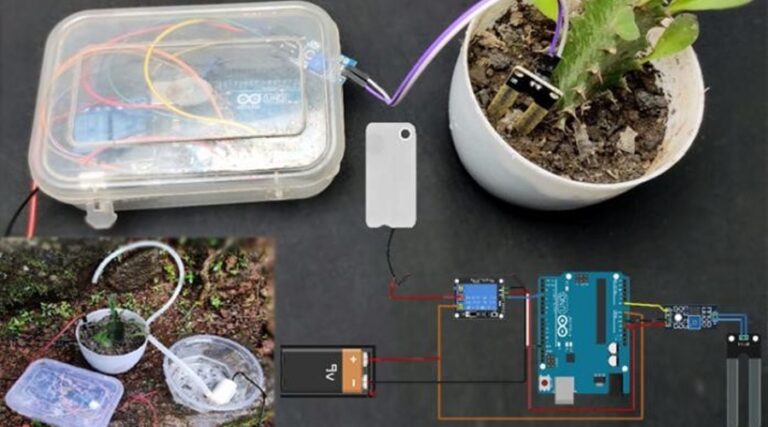
This thesis aims at setting up simple experimental devices and experimental activities on logic and modulated control applied to agricultural automation, to support the labs of the course Control Systems for Smart Agriculture. An example can be a simple automatic irrigation system, including one or more tanks with level control, one or more pumps with flow control, a moisture sensor, etc.
The work includes the set up of the experimental device and of an experimentally validated simulator, the design of the control system, its implementation on an Arduino board, and its validation in simulation and with suitable experiments.
This work is suitable for students with an engineering or non engineering background, and for a single student or for a group of two students.
Every time you have to design a control system, you have to first set up a model of the plant, that allows to study its properties, design the controller, and perform a preliminary validation, in simulation, of the control system. In the case of agricultural robots/machines, the model can be used to test different mechanical designs, as well.
This thesis aims at developing the model of an Agilex robot, suitable for off-road tasks, including the models of terrains with different mechanical characteristics, using Modelica language. The simulator is then validated comparing the behaviour of the simulated robot with the behaviour of a real platform.
This work is suitable for students with an engineering or non engineering background, and for a single student or for a group of two students.
To design a control system, it is first necessary to develop the model of the system to be controlled. This model is useful for studying the system’s properties, designing the controller, and performing a preliminary validation of the control system through simulation.
In the case of robots and agricultural machines, the model can also be used to verify the results of different approaches to the mechanical design of the system. To achieve this and validate the control system in a realistic context, an accurate soil model is also required.
This thesis aims to extend the model of an Agilex tracked robot, developed in a previous thesis, by including an accurate soil model. The model will then be experimentally validated by comparing the behavior of the simulated robot with that of a real platform.
This work is suitable for students from both engineering and non-engineering backgrounds and can be undertaken by either a single student or a group of two students.
 P22/23-ENG
P22/23-ENG